您现在的位置是: 首页 > 硬件咨询 硬件咨询
相机标定_相机标定棋盘格
tamoadmin 2024-08-25 人已围观
简介1.工业相机需不需要标定?2.相机标定原理3.上下相机对位贴合怎么标定原理4.上相机如何标定旋转中心5.投影仪相机位置标定方法rms光学面扫描系统需要标定的情况有如下这些:1、相机标定:确定相机内部参数和外部参数,包括焦距、畸变、相机的旋转和平移等。2、扫描头标定:确定扫描头的位置、姿态和扫描范围,以及扫描头和相机之间的相对位置关系。3、激光标定:确定激光的光斑位置和大小,以及激光的发射角度和强度
1.工业相机需不需要标定?
2.相机标定原理
3.上下相机对位贴合怎么标定原理
4.上相机如何标定旋转中心
5.投影仪相机位置标定方法
rms光学面扫描系统需要标定的情况有如下这些:
1、相机标定:确定相机内部参数和外部参数,包括焦距、畸变、相机的旋转和平移等。
2、扫描头标定:确定扫描头的位置、姿态和扫描范围,以及扫描头和相机之间的相对位置关系。
3、激光标定:确定激光的光斑位置和大小,以及激光的发射角度和强度等参数。
4、标定板标定:使用标定板进行标定,确定标定板的几何形状、大小和位置等参数,以及标定板上的特征点和其在图像中的位置。
5、系统误差标定:对系统误差进行标定,包括机械误差、光学误差和电子误差等。rms光学面扫描系统是一种用于分析样品表面形貌和表面成分的仪器。它利用激光束扫描样品表面,通过反射回来的光信号来获取样品表面的高度和形貌信息。
工业相机需不需要标定?
最近在标定相机,然后遇到各种问题,看了将近一周终于明白了一些东西,回忆了一下好像就是之前工程光学和高数的东西。。。怕忘了在这里记一下。。。
这个是最常用的成像模型,其实就是认为物体和相机成的像是相似的,
在小孔模型下相机的畸变其实是比较小的。
小孔模型下畸变分为径向畸变和切向畸变,用opencv做标定的时候会得到cx、cy、fx、fy这几个内参以外,还会得到k1、k2、k3、p1、p2这个5个畸变参数,k1-k3是径向畸变系数,p1、p2是切向畸变系数。
切向畸变是由于制造工艺缺陷导致的镜头与成像平面不平行造成的。大概会变成这样的一个图案。
通常会用这样的公式来描述切向的畸变以及反畸变矫正
径向畸变的原因是光线在远离透镜中心的地方比靠近中心的地方更加弯曲,通常是镜头设计的原因。可以发现径向畸变主要是和θ有关(θ是只物点和成像中心的连线与主光轴的夹角)。而和角度相关的函数通常都是由sin、cos这些构成的,所以也可以用泰勒级数进行描述(个人理解)。泰勒级数是一个逐次逼近的函数,可以无线精确但是通常会根据经验人为的选择精确到几次方,在这里通常精确到6次方,所以就变成了下面这个公司,其中的k1、k2、k3就是opencv生成的那3个系数。
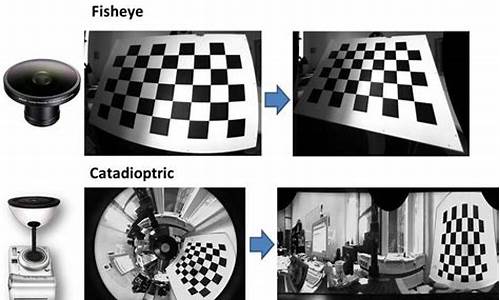
小孔模型有一个局限就是当视角超过180度的时候就没办法工作了,因为相机平面要无限大才行。所以FOV超过一定程度的时候就需要换成鱼眼模型。
他的做法是先把所有的物成像时先投射到一个半球上,然后再把这个半球投影到成像平面,可以想到这时所有的物会成像为一个圆形。所以我们平时看到的鱼眼镜头的照片都是一个圆形。
这里发生了几个变化,1个是fx和fy变成了一样的数值,因为球和圆的长短轴是相等的。另外一个是取消了切向畸变,我个人的理解是因为光轴的偏转可以用fx、fy来体现,所以切向畸变就没意义了。
所以畸变就只有径向畸变了。所以也只和θ有关了。畸变系数在opencv中会得到k1-k4,而matlab中会求到k1-k3。
看到了这篇文章我觉得讲得挺好的,就是为什么要做泰勒展开以及泰勒展开是如何推导的,不过他用的这个图实在是有点尴尬,上班的时候打开总是会莫名的心虚。。。 s://.zhihu/question/25627482
我大致的总结一下大概的问题是,因为sin、cos这些函数比较难直接直接求得某一处的函数值,比如sin2这种除非用计算器不然很难算。所以我们想能不能用一些容易求得的函数来近似的描述他。比如一个函数f(x)我们用另外一个函数g(x)来描述。如何让他们相等,可以选一个点比如(0,1)这个点,我们让f(0)=g(0),然后让f和g的导数也相等,然后让导数的导数也相等。。。这样就可以逐次逼近f(x),但是因为sin、cos是可以无限求导的,而多项式求导级数会逐渐下降,所以只能逐次逼近这样最终会得到一个g(x) = k1x+k2x2+k3x3......这样的多项式。其中k1-k3这些就是泰勒展开的系数。
相机标定原理
看应用,对精度,畸变率要求高就需要进行标定。
工业相机标定是根据工业相机模型,由已知特征点的图像和世界坐标求解工业相机模型参数,建立图像点与对应空间点之间的位置关系。相机标定法可分为:传统标定方法、自标定方法。传统标定法是根据标定物结构信息进行标定,可用于任意的摄像机模型,标定精度高,但不足之处是需要高精度的标定物;而自标定方法不依赖于标定参照物,仅利用摄像机在运动过程中周围环境图像与图像之间的对应关系来对摄像机进行的标定的方法称为摄像机自标定方法。
Regem MarrRegem Marr 研祥金码的智能读码器在设计之初就用工业级设计,TA的IP防护等级达到了IP67,已经差不多是最高级了,从防护等级来看Regem MarrRegem Marr 研祥金码这波是在大气层上了。IP67防护等级的产品可以用于雷电、沙尘、电磁干扰、静电等恶劣工业环境,并且能在这些恶劣环境中持续运行不受影响。
Regem Marr 研祥金码的R-3000系列快速、全方位的条码捕捉读取。内置丰富的IO接口,支持复杂现场需求。集成多组可控光源,实现光源分路独立控制,响应你的柔性化生产需求。多核并行处理,提高整体读取速度。
有什么不清楚的您随时随地拨打4000-6-7服务热线,均可获得产品介绍、购买咨询、售后处理等人工服务,您反馈的任何问题,都将得到专业贴心的解答。
上下相机对位贴合怎么标定原理
一、为什么要相机标定?
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。
1进行摄像机标定的目的:求出相机的内、外参数,以及畸变参数。
2标定相机后通常是想做两件事:一个是由于每个镜头的畸变程度各不相同,通过相机标定可以校正这种镜头畸变矫正畸变,生成矫正后的图像;另一个是根据获得的图像重构三维场景。
摄像机标定过程,简单的可以简单的描述为通过标定板,如下图,可以得到n个对应的世界坐标三维点Xi和对应的图像坐标二维点xi,这些三维点到二维点的转换都可以通过上面提到的相机内参K ,相机外参 R 和t,以及畸变参数 D ,经过一系列的矩阵变换得到。
二、什么叫相机标定?
在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)
三、为什么相机标定很重要?
无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。因此,做好相机标定是做好后续工作的前提,提高标定精度是科研工作的重点所在。
上相机如何标定旋转中心
上下相机对位贴合标定原理:相机标定主要用九点标定,通过走九个点位,得到图像坐标系与机械坐标系的关系。标定步骤:
1、上相机标定。
2、下相机标定。
3、上下对位。
投影仪相机位置标定方法
1、将标定板放置在相机的视野范围内,确保标定板完全可见,并且相机能够拍摄到标定板的多个角点。
2、使用相机拍摄多张包含标定板的图像,使用图像处理软件(如OpenCV)来提取标定板图像中的角点。
3、通过对角点进行相机标定,可以获得相机的内参矩阵和畸变系数,使用标定结果对图像进行校正,以验证旋转中心的准确性。
投影仪相机位置标定是一种通过摄像机和投影机的物理位置关系,将矩形投影器中的像素映射到实际世界中的坐标系的技术。它通常在机器视觉、虚拟现实和增强现实等领域中得到广泛应用。下面介绍一种基于标定板的标定方法。
1.制作标定板首先,需要制作一张标定板,它通常是一个尺寸为A4或A3的纸板,上面有一个黑白间隔卷曲的棋盘图案。通过这个棋盘图案,可以从多个角度捕捉到各种不同的图像,以便计算摄像机和投影机之间的几何关系。
2.集标定图像将标定板放在需要标定的区域内,以不同的角度、距离和旋转方向集至少10张棋盘格。集的要包括不同角度的平面棋盘格、侧面视图、俯视图等等,以便对不同方位的图像进行校准。
3.提取角点对集到的各个棋盘格进行角点提取。将每张图像转化为灰度图,再用Harris角点算法进行角点提取。
4.计算旋转矩阵和平移向量通过相邻棋盘格的角点坐标计算相机的内参矩阵,然后根据相邻棋盘格之间的欧氏变换关系,计算相机的外参矩阵。最后,用SVD分解等方法求出相机的旋转矩阵和平移向量。
5.校正投影图像将求得的相机的旋转矩阵和平移向量应用于投影图像,从而将投影图像转换到世界坐标系中,使得各个像素点对应到实际的坐标。
总之,对于一台机器视觉系统或增强现实系统而言,投影仪相机位置标定是一个重要的步骤。用标定板的标定方法可以准确地计算出相机和投影机之间的位置和方向,从而将虚拟内容稳定地投影到实际场景中,提高了系统的精度和稳定性。
下一篇:_荣耀手表2 46mm防水